On our last task in the ECNA, we struggled quite a bit, trying to do stuff with convexity and optimization. In the last half hour of the contest, I noticed it could be reduced to the Hungarian Algorithm but did not know how to implement it, so I passed it to my (super smart) teammate to code. According to him, it was something he learned a long time ago and immediately forgot, relying on the prewritten code in kactl instead. So I figured I should do the same thing---learn it and forget it. The first part entails learning it, though, so I've compiled the key parts of the algorithm here.
Problem: There is a fixed
matrix given. You select numbers in the grid with exactly one from each row and
column. Determine the minimum possible sum of the selected numbers.
For example, with
selecting the , , and gives the minimal possible sum . Evidently, being greedy doesn't work---if we were to start off by choosing the lowest number, , our final sum would be , which is suboptimal.
A brute force solution must look through possible selections, which is
much too slow. Instead, the Hungarian Algorithm solves this problem in , and
runs even faster in practice.
Algorithm: Observe that if the same number is subtracted from an entire row (or column),
every selection will experience the same , and thus relative to each other,
the optimal selection will not change.
This essentially gives us degrees of freedom to manipulate the matrix.
Our goal is to get the matrix into the following form:
- All entries are nonnegative, and
- There is a selection with all s
At this point, the selection of s is clearly optimal, so the answer to the problem would then just be the sum of the corresponding numbers in the original matrix.
The main part of the algorithm reads more naturally if we first transform the matrix
into a bipartite graph. Specifically, suppose we have vertices representing the rows,
and vertices on the other side representing the columns, and every cell in
the grid corresponds to an edge between a row vertex and a column vertex. The above
example would become
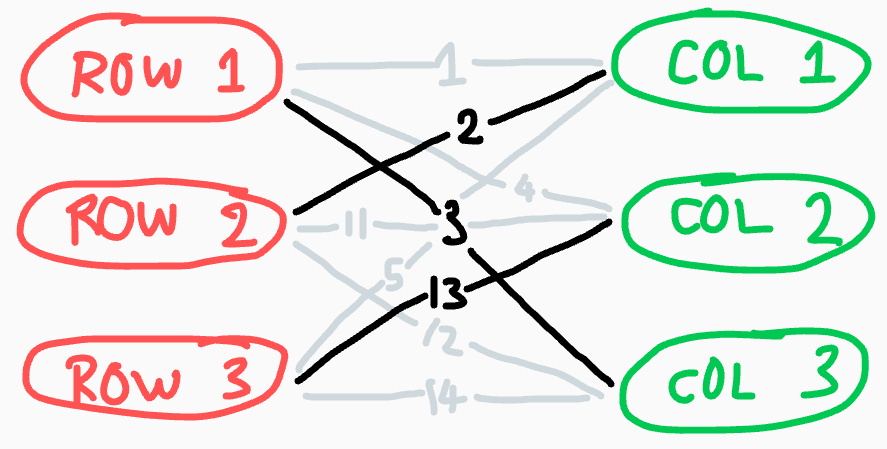
Then subtracting from a row/column is equivalent to assigning a potential
to a vertex. But, in order to keep all the entries nonnegative, we have the constraints
for each edge of the bipartite graph.
Further, whenever , we will call the edge tight, as we
are no longer allowed to increase or without decreasing the other
under the constraints. These tight edges are equivalent to an entry of the matrix being
, so our goal of finding a selection of s in the matrix
translates into finding a perfect matching of tight edges in the graph.
The algorithm seeks to build up a matching on tight edges starting from scratch (zero edges).
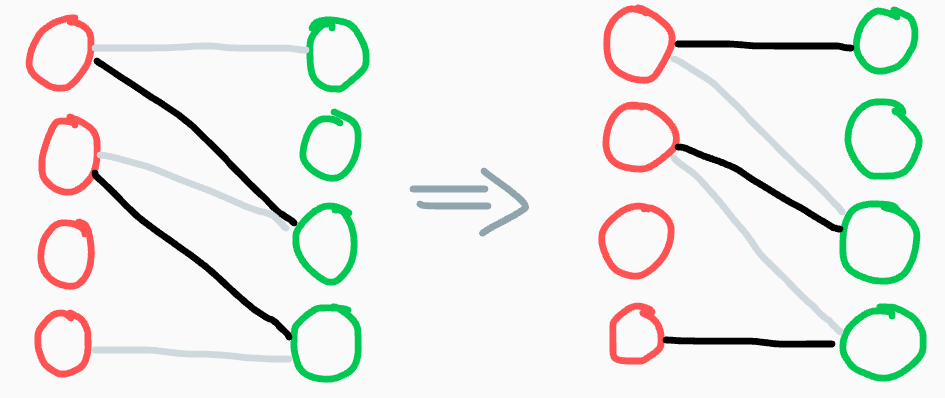
Our main technique to improve the matching involves finding an augmenting path (shown below).
These consist of alternating unmatched and matched tight edges, which allow us to relabel the
matching with an extra edge:
To find an augmenting path, start a depth-first-search from any unmatched red vertex. For each red vertex
encountered, traverse its tight edges to green vertices---if any of them are unmatched, then
we have an augmenting path. Otherwise, from those green vertices, follow the edges in the matching
up to new red vertices again, and repeat.
However, at some points of the algorithm (such as the very beginning), the current potentials
have not created enough tight edges to find an augmenting path. In this case, the DFS ends with
all leaves being red.
Here, we seek to induce more tight edges. Suppose we add to each visited red vertex and
subtract from each visited green vertex.
- Any edge between an unvisited red vertex and an unvisited green vertex is untouched,
- Any edge between a visited red vertex and visited green vertex has the same sum of potentials as before,
- Any edge between an unvisted red vertex and a visited green vertex lowers its sum of potentials by , hence still satisfies the constraints, and
- Any edge between a visited red vertex and an unvisited green vertex increases its sum of potentials by . But since the DFS has ended, none of these edges are currently tight.
So if we pick as the minimum slack over all the edges in the last category, we induce another tight edge there. On the other hand, this new edge allows us to continue the DFS to a new vertex. Since there are only vertices, after iterations of this subroutine, we are guaranteed to find an augmenting path.
The algorithm is roughly as follows:
for _ in range(n): #extend the matching n times
start a DFS from an unmatched row vertex
while (no augmenting path):
compute minimum slack
update potentials
continue the DFS
The while loop runs at most times per extension, so at most times total. Inside, updating potentials takes time, but naively computing minimum slack over the edges in the 4th category takes time, so the current complexity is .
This can be optimized as follows: Suppose we have an array, that for each green (column) vertex, stores
the minimum slack to any visited red vertex.
- When we go to compute the minimum slack in the inner loop, the answer is just the minimum of the values of the unvisited vertices in the array, which can be found via a simple pass.
- When we update potentials, every slack simply decreases by , so we can update the array in time.
- When a new red vertex is visited, we can look through its edges and update each slack of the array
if the new slack is smaller, also in time.
(This is the biggest timesave, as we only look at the slack of each edge once per DFS as opposed to on every iteration of the inner loop).
Therefore, this optimization reduces the time complexity to . At the same time, each DFS
may find an augmenting path before we have to make potential updates, so the practical runtime
is somewhat faster (i.e. could still work in seconds).